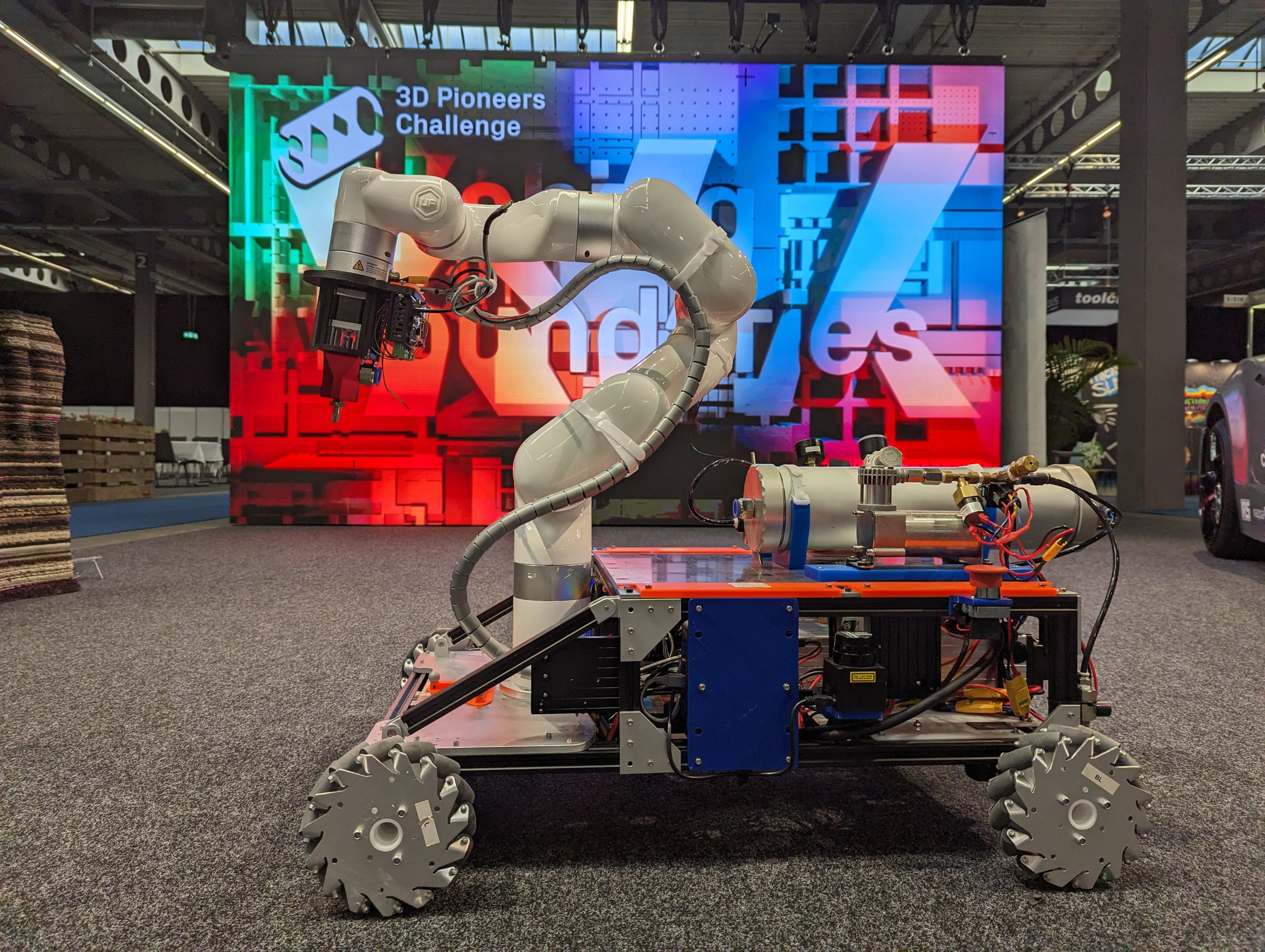
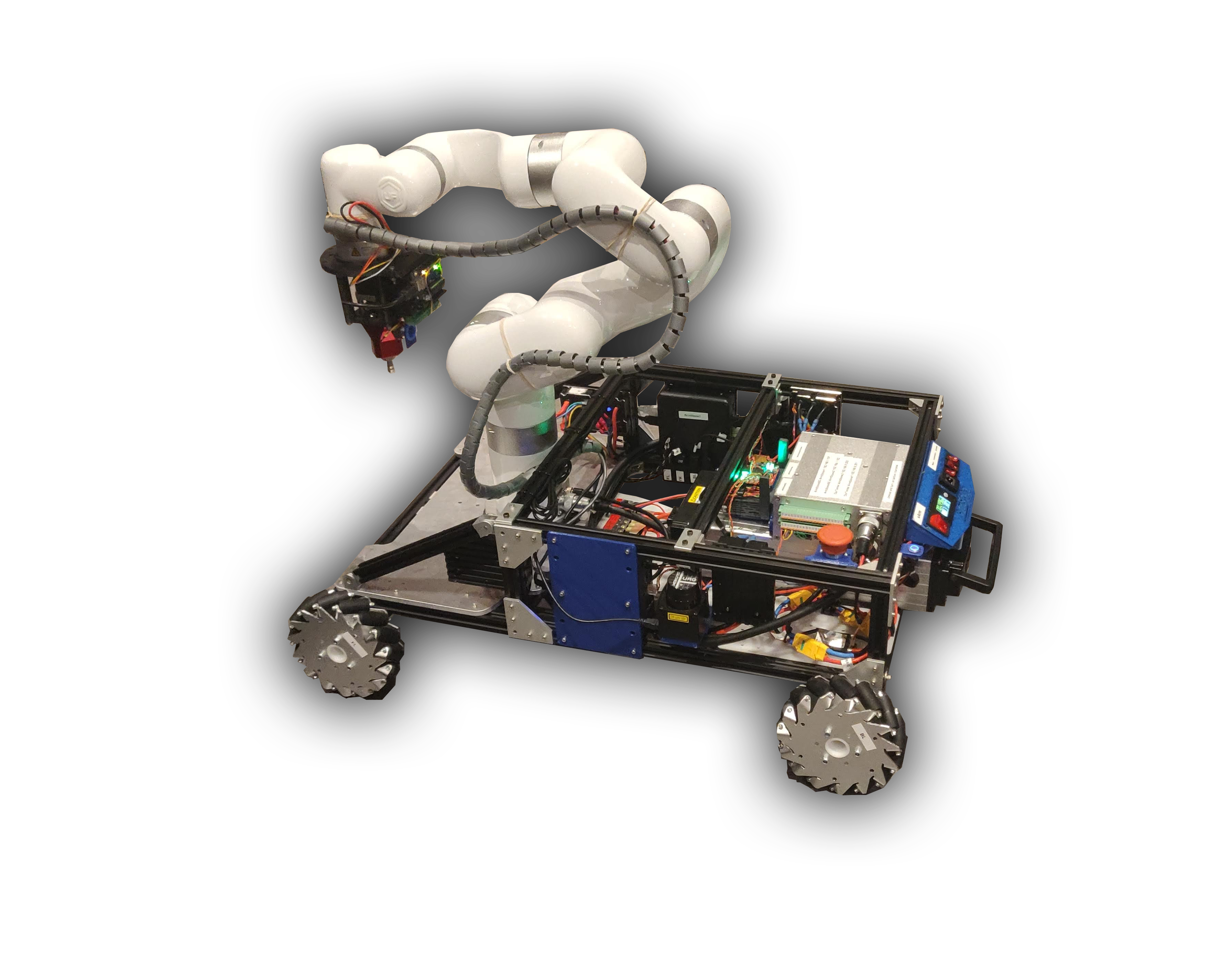
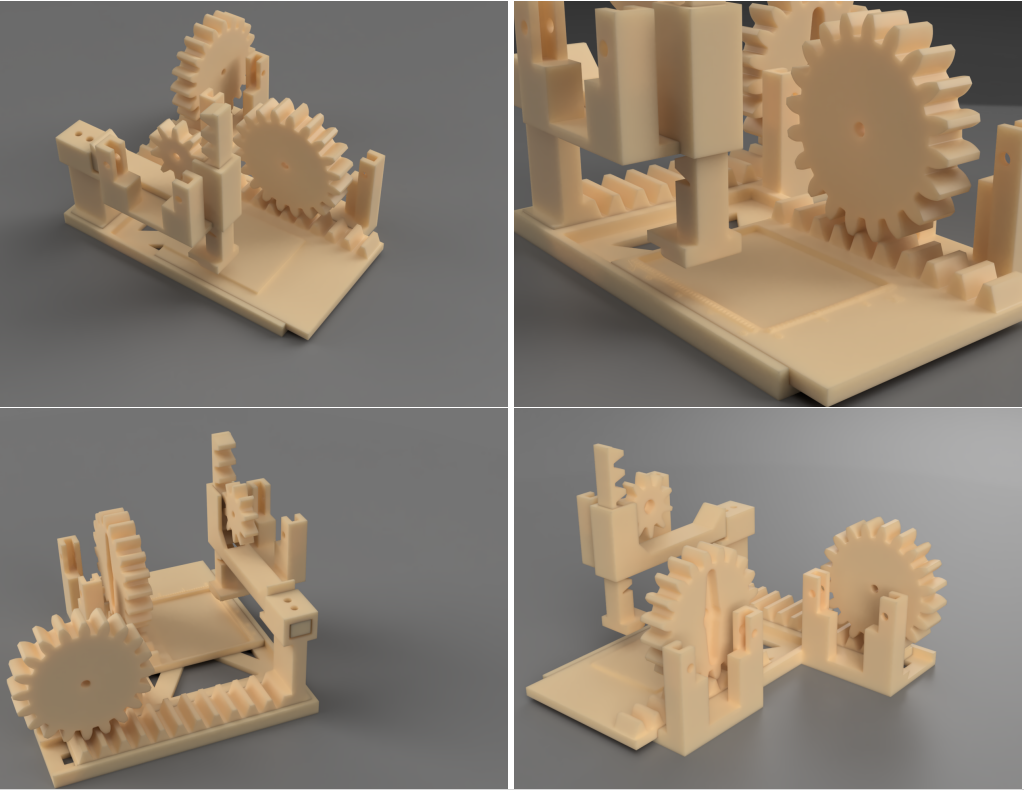
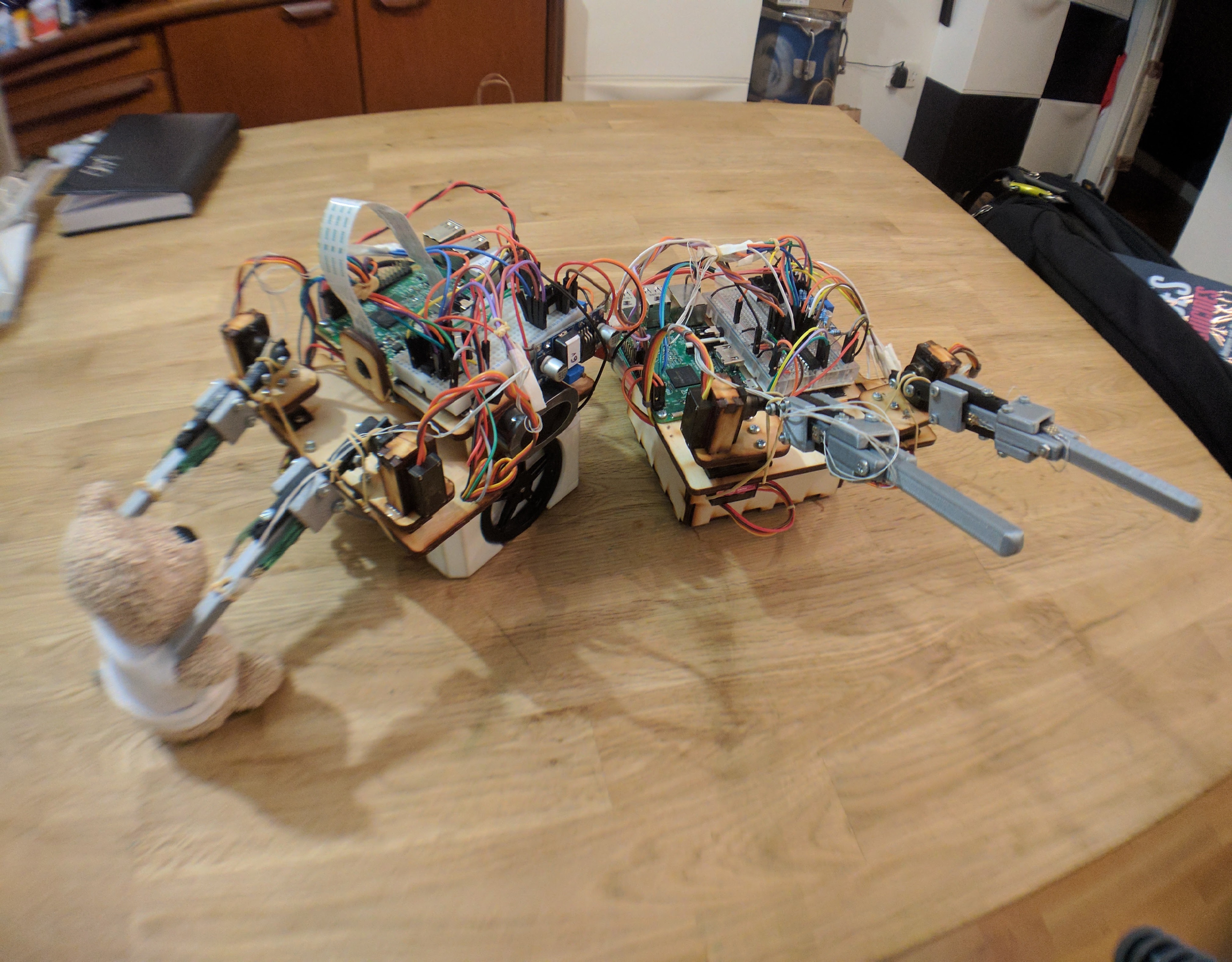
To help finish off my Phd, I’ve decided to invest some money into my own robot. It took few weeks of planning, hours and hours of CAD modelling and a million Ebay browser tabs. I’d also like to thank Jose Mendoza, Bart Garcia-Nathan, Sebastian Kay and George Dwyer for providing...
[Read More]